NEW
リアルタイム移動行動生成 AIコアエンジン
Forcesteed-ARIA
カメラだけで自律行動
Forcesteed-ARIA(アリア)とは
SLAM・高精度地図に依存せず、カメラ映像から数秒先の移動経路をリアルタイムで生成するAIコアエンジン。ロボットが環境を理解し自律的に行動する「モビリティ知能」の基盤技術。
CHALLENGESロボット導入を阻む、インフラの壁
磁気マーカー、SLAM、高精度地図...外部インフラへの依存が、コストと時間を膨らませ、導入の壁になっている。
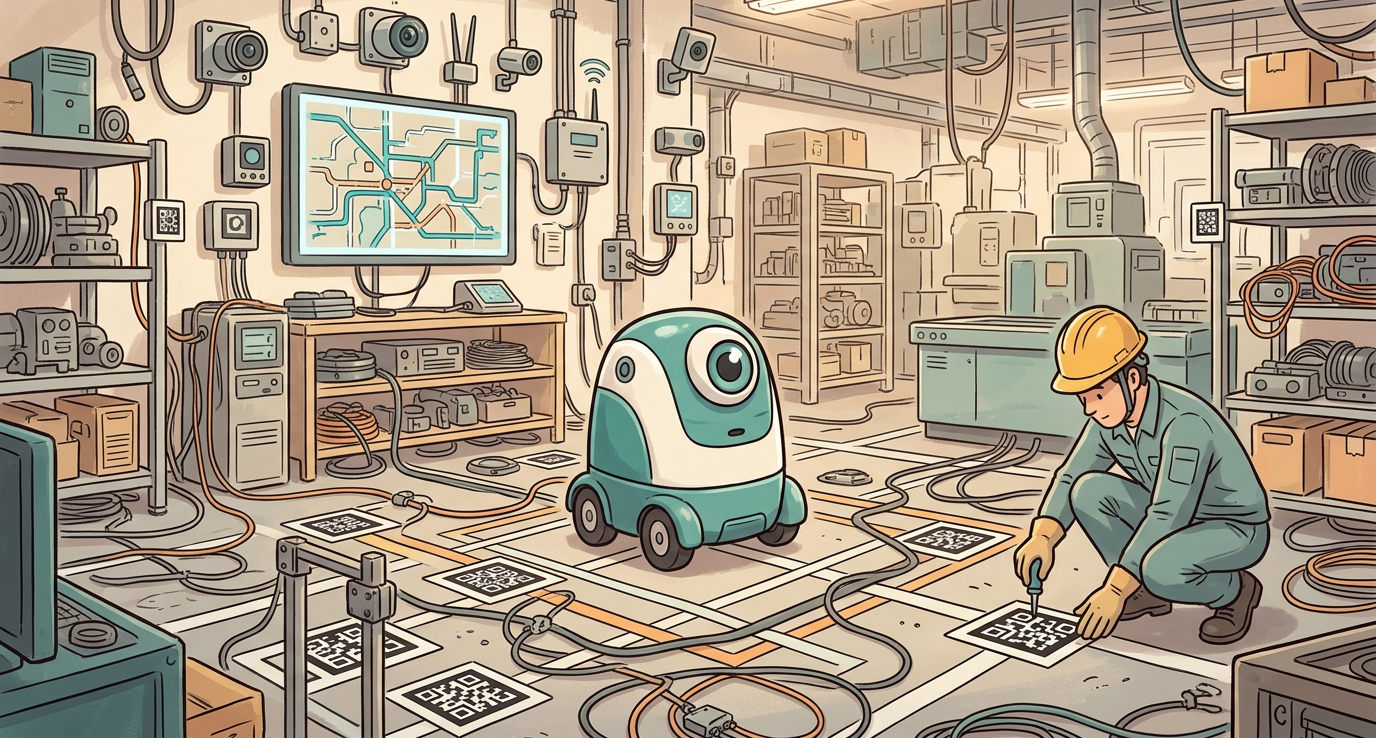
インフラの壁
磁気マーカー、SLAM、高精度地図など外部インフラへの依存が、コストと時間を膨らませ、導入障壁に。

Forcesteed-ARIAの答え
カメラ映像から数秒先の移動経路をリアルタイム生成。地図も設備工事も不要。カメラだけで自律移動。
FEATURESForcesteed-ARIAの特長
-

マップレスナビゲーション
SLAMや事前地図が不要。環境変化に強く、迅速な導入が可能
-

リアルタイム経路生成
映像入力をリアルタイムで処理。動的な障害物を回避し即座にプランニング
-
完全ローカル動作
クラウド不要のローカル処理。クラウド接続に依存せずリアルタイムに動作
-
VLA型AI基盤モデル
自動運転用VLA型AIをロボット用途に適した軽量構成として試作
COMPARISON比較: SLAM方式 vs Forcesteed-ARIA
| 比較軸 | SLAM・地図方式 | Forcesteed-ARIA |
|---|---|---|
| 事前地図 | 必要(作成・更新コスト大) | 不要 |
| 環境変化への対応 | 地図再作成が必要 | リアルタイムで適応 |
| 導入コスト | 設備工事・インフラ整備 | カメラのみ |
| クラウド依存 | サーバー通信が必要な場合あり | 完全ローカル |
PROOF OF CONCEPT実環境での検証結果
外光が入るロビー、障害物の多い屋内、西日が差し込む屋外など、過酷な環境で検証を実施。
- 緑線: 実際のロボット軌跡(Ground Truth)
- 赤線: AIが予測した軌跡(Prediction)
高い精度で一致。多様な環境で安定した経路生成を実証。

実環境テストにおける予測軌跡(赤)と実際の軌跡(緑)の比較結果
CAPABILITIES実現可能なロボット行動
- 人や障害物を考慮した移動行動のプランニング
- 目的を示すプロンプトに応じたパスを生成
- 通路や空間構造に沿ったナビゲーション
- 地図に依存しないマップレス移動
- カメラ情報のみを用いたリアルタイム行動生成
