汎用ヒューマノイドコントローラ
Forcesteed-LEIVOR
従来のロボットと同じ感覚で使える
Forcesteed-LEIVOR(レイバー)とは
ティーチング × 模倣学習 × 推論。産業用ロボットの知見を、ヒューマノイドへ。
SIerの既存人材・技術をそのまま活かし、ヒューマノイド分野に即戦力として参入可能にする汎用コントローラです。
CHALLENGESヒューマノイド導入の3つの課題
-
01
開発思想の断絶
産業用ロボットはティーチングによるプログラム設計が一般的。一方ヒューマノイドは模倣学習・推論が主流。開発手法が接続していない。
-
02
SIerノウハウの不活用
開発思想の違いにより、産業用・協働ロボットで培ったSIerの技術・運用ノウハウをヒューマノイドに活かすことが難しい。
-
03
現場導入の限界
ヒューマノイドの導入がAI研究者・先端プレイヤーに限定。現場を知るSIerが参入できず、利活用を見据えたPoCが進まない。
FEATURESForcesteed-LEIVORの特長
-

汎用コントローラ
特定機種に依存しない共通開発基盤
-

ティーチング対応
産業用ロボットの動作教示ノウハウを活用
-

模倣学習
人の作業データから動作を学習
-

VLAモデル対応
LeRobot等の最新AI技術に対応
-

マルチロボット対応
ugo / RealMan / Unitree 対応
-

干渉チェック
周辺物体との安全確認機能
-

SIerの開発手法を活用
既存のSIer人材・技術をそのまま活かす
-
ハイブリッド制御
ルールベース+AI制御を統合
-

推論処理
状況が変化する現場にも柔軟に対応
-

共通開発基盤
機体ごとの環境分断を排除
-

現場PoC支援
研究でなく利活用を見据えた導入
-

拡張性
対応ロボット・機能を随時拡張
SCREENSHOT画面イメージ
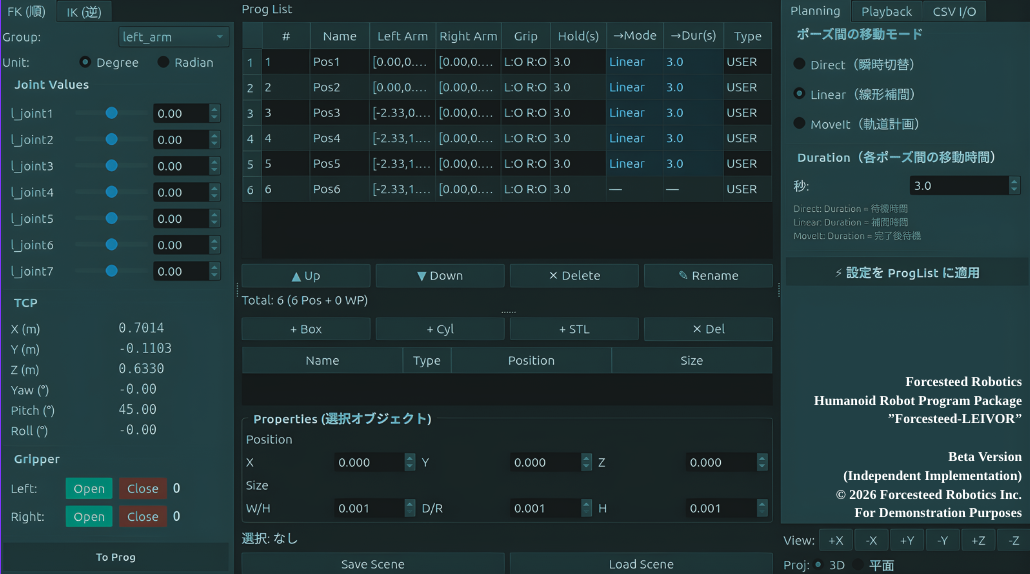
Forcesteed-LEIVOR メインUI

ティーチング画面

干渉チェック
Forcesteed-LEIVORが実現すること
-
01
ティーチングとAIを同一フローで
従来のティーチング型ロボット開発とAIロボティクス(模倣学習・推論)を同一の実装フローで扱えるソフトウェア。
-
02
SIerの既存人材・技術をそのまま活用
産業用・協働ロボットで培ったSIerのノウハウをそのまま活かし、ヒューマノイド分野に即戦力として参入可能。
-
03
特定機種に依存しない共通基盤
ugo・RealMan・Unitreeに対応(随時拡張)。機体ごとに開発環境を分断せず、共通の開発基盤として利用可能。
ROBOTS対応ロボット
-

ugo
ugo株式会社製セミヒューマノイド
-
RealMan
RealMan Robotics製協働ロボットアーム/セミヒューマノイド
-

Unitree
Unitree製ヒューマノイドロボット
STRUCTUREForcesteed-LEIVORが変える産業構造
産業用ロボットSIer
既存の技術・人材

Forcesteed-LEIVOR
つなぐ
ヒューマノイド現場
新しい市場へ
FUTURE今後の展開
-
01
VLAモデル対応の拡充
LeRobot等のVLAモデルに対応。模倣学習・推論の適用範囲を拡大。
-
02
画像認識との統合
画像認識技術および既存のロボットピッキングパッケージと連携。
-
03
現場適応型システムへ
ヒューマノイドを個別機体でなく「現場に適応する汎用ロボットシステム」へ。
