株式会社Forcesteed Robotics(本社:東京都江東区、代表取締役:大澤弘幸、以下「Forcesteed Robotics」)は、ローカル環境で動作するAIエージェント「Forcesteed-Luqua(フォースティード・ルクア)」を開発しました。
Forcesteed-Luquaは、AIエージェントの長期記憶、判断、ワークフロー実行、外部ツール連携を統合する基盤です。ユーザ個別のワークフロー、業務ルール、知識を長期的に保持し、それらを踏まえた自律的な判断と実行を可能にします。機密データを外部クラウドへ送信することなくオンプレミス環境で運用することができます。また、各社固有のデータや業務プロセスに合わせた知識蓄積や運用が可能であり、ユーザごとの業務文脈に適応したAIエージェントとして利用できます。
さらに、MCPを中心とした外部ツール連携やROS2による外部操作に対応しており、AIによる判断とロボットや制御システムなどの実世界の動作を接続する基盤としても利用できます。

開発背景
生成AIの活用は急速に広がり、近年ではAIが自律的にタスクを実行する 「AIエージェント」 の概念が注目されています。
海外ではOpenClawなどのエージェントアーキテクチャが登場し、AIが複数のツールを利用しながらタスクを継続的に実行する新しいソフトウェア基盤として期待されています。
一方で、こうしたAIエージェントの多くはクラウド環境を前提としており、企業の実運用ではいくつかの課題が残されています。
機密情報を扱う業務では外部クラウドへのデータ送信が難しい場合があり、また企業ごとに異なる業務プロセスや運用ルールに汎用AIを適応させることも容易ではありません。さらに、エージェントやツールを組み合わせたシステムは構成が複雑になりやすく、既存の企業システムやロボティクスとの統合も簡単ではありません。
Forcesteed Roboticsは、こうした状況に対し、AIエージェントの有用性を活かしながら 企業環境で実際に運用できる知能基盤 が必要であると考えてきました。
そこで開発されたのが、Forcesteed-Luquaです。
Forcesteed-Luquaの特徴
Forcesteed-Luquaは、記憶 → 判断 → 実行 → 接続 → 拡張を継続的に行う自律AIエージェントです。
主な行動は次の5つのサイクルで構成されています。
記憶する
ユーザー固有の知識、業務ルール、ワークフロー、過去履歴を長期記憶します。
判断する
記憶された文脈や状況をもとに、次に取るべき行動を自律的に判断します。
実行する
タスク実行、ワークフロー処理、定期処理などを自動的に実行します。
接続する
MCPによる外部ツール連携やROS2接続により、ソフトウェアやロボットなどの外部システムを操作できます。
拡張する
新しいスキルやエージェントを追加することで、機能を継続的に拡張できます。
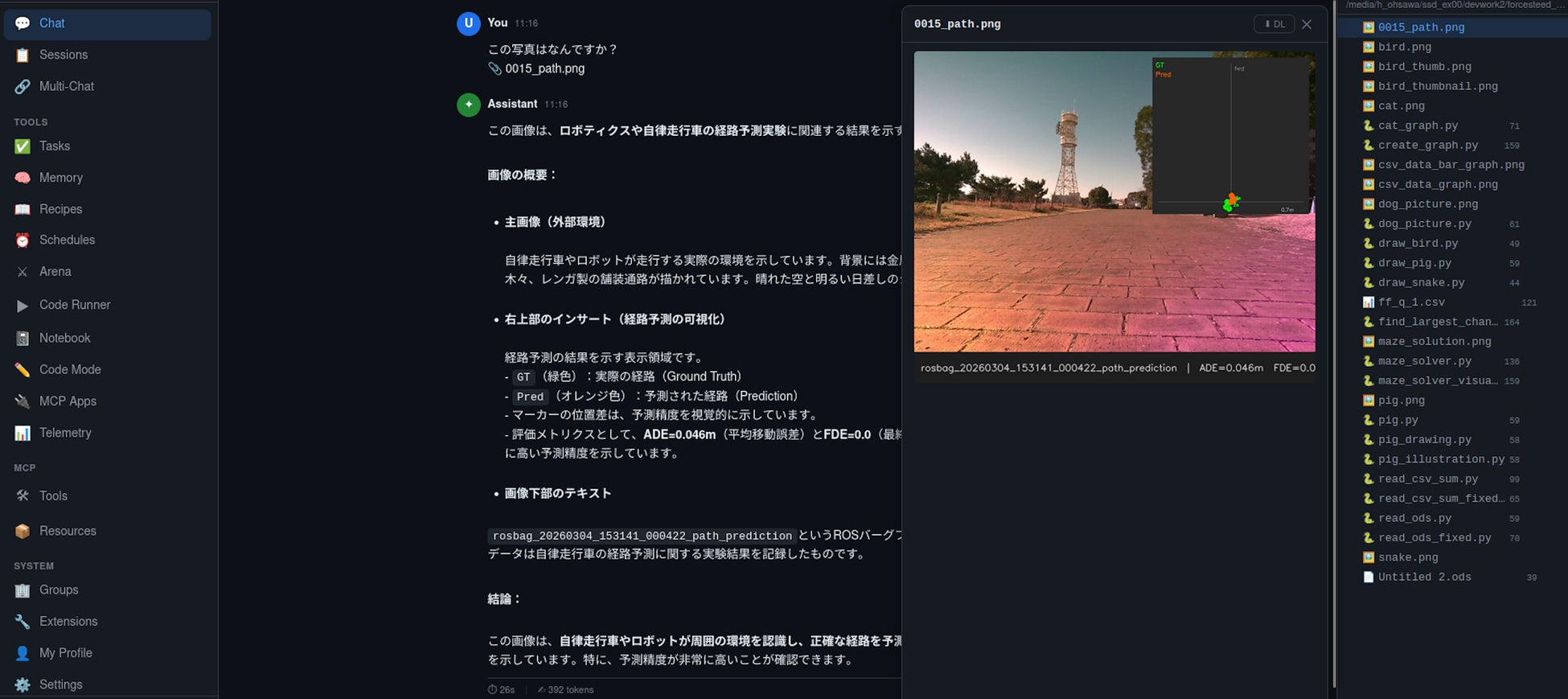 Forcesteed-Luquaによる、当社VLA実験結果の理解検証画面。
Forcesteed-Luquaによる、当社VLA実験結果の理解検証画面。
主な機能
Forcesteed-Luquaは、以下の機能を備えています。
- ユーザ個別のワークフロー・ルール・知識の長期記憶
- レシピベースのワークフロー自動化
- セッション横断検索
- リスクベースの権限制御
- 定期実行・タスク管理
- MCPを中心とした外部ツール連携
- ROS2による外部操作連携
- VLMサブエージェント
- 並列エージェントによる拡張実行
- スキルシステムによる機能拡張
- ファイル監視、画像・PDF読み取り
- TerminalおよびWeb GUIインターフェース
今後の展開
Forcesteed Roboticsは、Forcesteed-Luquaをユーザの業務基盤やプロダクトに組み込まれる知能基盤として展開していく方針です。
今後は、ローカル環境でのAIエージェント運用を前提とした機能拡張や基盤モデルの改良を継続するとともに、MCPやROS2を通じた外部接続機能を拡張し、ロボットや各種制御システムとの連携を含むフィジカルAI領域への適用を進めていきます。
株式会社Forcesteed Roboticsについて
Forcesteed Roboticsは、AI × 画像認識 × ロボティクス技術を用いたフィジカルAI分野の研究開発および社会実装を行うスタートアップです。現場におけるロボット活用を見据え、AIの認識・判断・制御を組み合わせたシステムの構築や、学習用データ収集基盤の提供を通じて、研究開発から現場導入までを支援しています。
本件に関するお問い合わせ先
本記事に関するお問い合わせ:
株式会社Forcesteed Robotics 広報担当
contact@forcesteed.com
株式会社Forcesteed Roboticsのプレスリリース⼀覧:
https://prtimes.jp/main/html/searchrlp/company_id/157769
会社概要
会社名:株式会社Forcesteed Robotics
所在地:東京都江東区青海2丁目7番4号 The SOHO
設立:2024年07月29日
代表取締役:大澤弘幸、諸岡亜貴子
事業内容:● AI・画像認識・ロボティクス技術の研究開発および社会実装
● Spingence社製「Edgestar」サーバの販売および技術支援
● RealMan Robotics社の日本における戦略パートナー
● ugo社製ロボットの販売代理店
Webサイト:https://www.forcesteed.com/



